









The Automatic bagged cement palletizing and loading machine Factory Gachn gourp loader system adopts 3D scanning technology, which can accurately locate and scan the external shape of the vehicle to achieve the purpose of accurate loading position, interactive interlocking between the loading system and the packaging machine, and automatic loading.
Product name :
Bagged Cement Palletizing And Loading MachineItem No :
FK008-IIOrder(MOQ) :
1Payment :
30% advance payment, 70% balance before shipment or negotiableProduct Origin :
xiamen,chinaShipping Port :
XIAMEN or Or according to your needsLead Time :
3 monthsBagged Cement Palletizing And Loading Machine
Original bagged cement leaving the factory mostly by manual loading, or semi-automatic loading equipment, and manual labor was required to receive the materials. With the shortage of labor and the rising labor costs, companies need fully automatic loading systems to replace manual labor to save costs. During the process of cement bagging, workers are in an environment with a large amount of dust, which is prone to occupational diseases such as pneumoconiosis.

The robot loader is actually the application of the manipulator in the cement bagging system. The manipulator has precise control, which can improve efficiency, reduce the labor intensity of employees, improve the working environment, and reduce energy consumption. Its use has liberated labor and played an important role in the development of the industry. The fully automatic cement loader can adapt to different types of vehicles and automatically load. Its recognition system uses laser and 3D scanning to obtain vehicle information, and the positioning system obtains vehicle location information through multiple laser sensors. The robot combines the above information to grab, plan and automatically bag cement bags.
Working principle of Automatic bagged cement loading system Agent Gachn gourp Cement loader
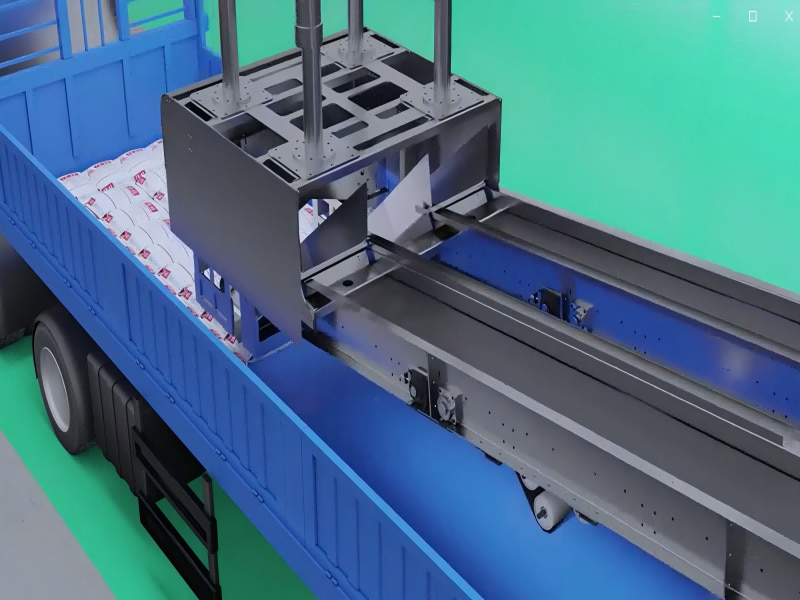
The Automatic bagged cement palletizing and loading machine Factory Gachn gourp loader system adopts 3D scanning technology, which can accurately locate and scan the external shape of the vehicle to achieve the purpose of accurate loading position, interactive interlocking between the loading system and the packaging machine, and automatic loading. The reason why the Gachn gourp loader can move freely in a small area is that it uses a hoist with a three-dimensional telescopic mechanism to achieve the goal of modeling control and coordinated operation of the X, Y, and Z axis mechanisms.
Dust removal system
The automatic bagged cement loading system Dealer Gachn gourp loader is equipped with a dust removal system, which consists of a dust removal hood, a dust removal pipeline, and a dust removal machine, which can greatly improve the dust raised during the loading process. Most cement plants have existing dust removal systems, and only need to modify the pipelines before use.
The dust collector can process air volume up to: 100000m3/h

Gachn gourp cement automatic loader can complete packaging
1. Loading material: bagged cement
2. Bagged cement specifications: 50kg/bag, 650mm (length) × 400mm (width) × 140mm (thickness)
3. Bag packing machine bagging speed: 120t/h
4. Automatic loader capacity: ≥90t/h
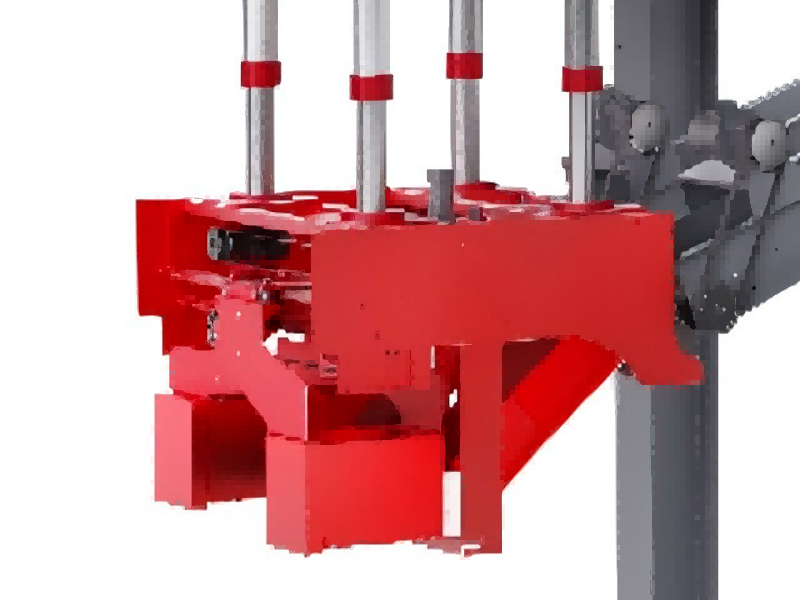
Loading host
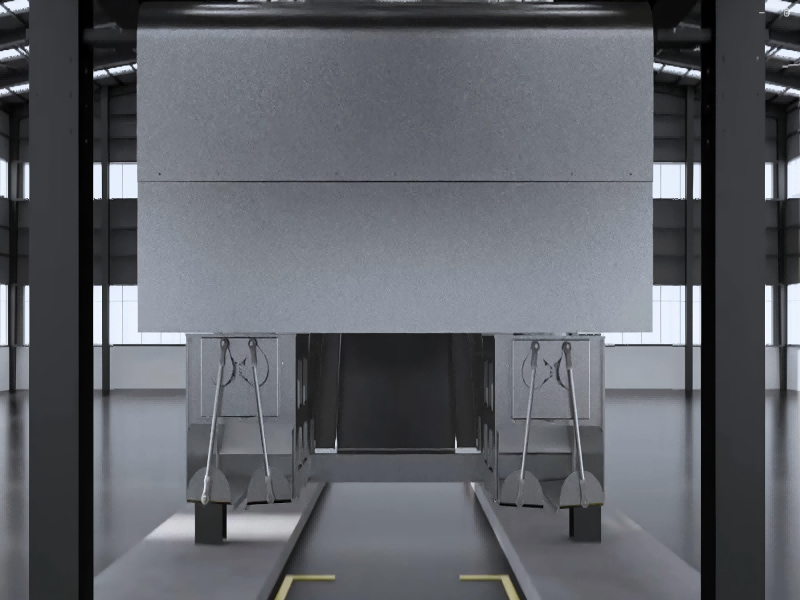
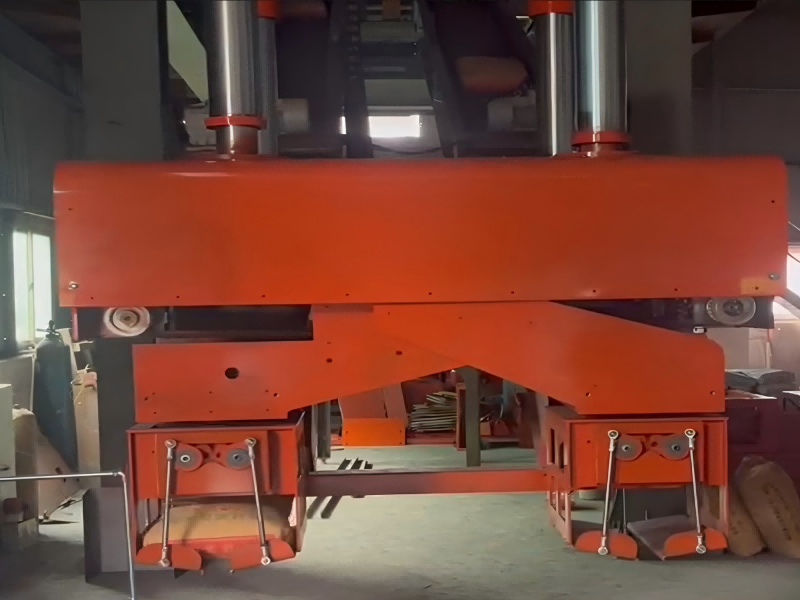
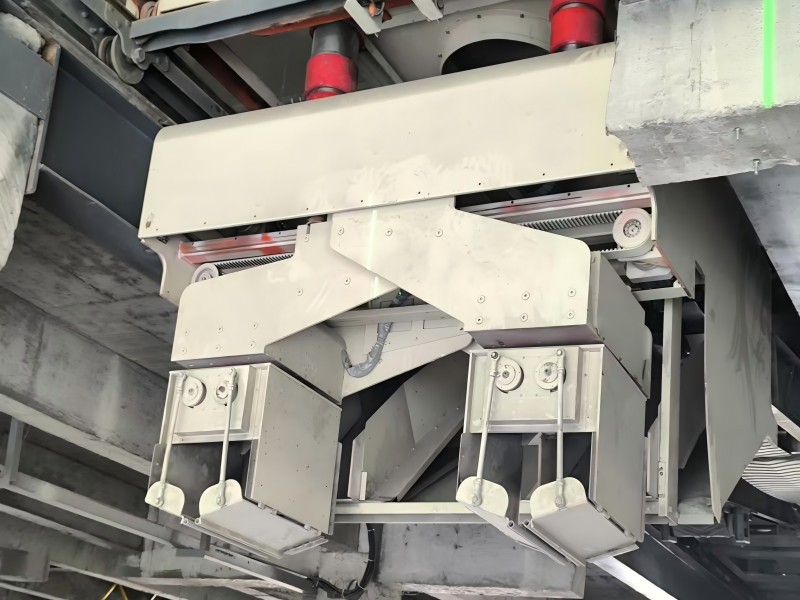
The dust collection mechanism at the head of the robot loader consists of a telescopic pipe fixing mechanism, a telescopic air duct, a dust collection air trough, a vertical dust collection air duct and other mechanisms. The vertical conveying dust collection air duct and the front of the car completely enter the car compartment for loading, ensuring that dust can be collected quickly and without dust.
Vehicle scanning system (3D scanning)
Gachn gourp loader vehicle scanning system (3D scanning) can not only complete the scanning and identification of vehicle structure, but also scan the fuel tank at the front compartment fence and the rolled-up tents of some vehicles. It can also identify the compartments with tie bars. Through internal system calculation, the corresponding layout is made for the compartments to be bagged, realizing the purpose of automatic calculation of secondary loading.
Control cabinet group and sensor:
The robot loader control cabinet group and sensor mainly include LED display screen motion control system cabinet, touch screen automatic/manual reset operation console cabinet, embedded video decoding display system, audio, network high-definition digital camera, robot-specific cable, sensor instrument (continuous package identification detection device, package entry detection device, sub-package detection device, in-place detection device), control cabinet automatic cooling system and other components. It realizes the combination of on-site and cloud, and the construction of intelligent loader intelligent platform and 5G network realizes system sharing and hierarchical management, providing conditions for the intelligent construction of cement plants.
System software:
The system software is mainly divided into integrated system software and card swiping software, and achieves the purpose of intelligent modeling and adaptive motion algorithm.
The integrated system software of the robot loader consists of scanning software, driving software, lifting sensor automatic control software, conveying automatic control software, intelligent loader system control software, basic system control software, automatic loader control software and other software systems. The software system is based on the basic system control software and driving software, and cooperates to complete the vehicle box (including tensioning) information scanning, Z-axis lifting, X, Y axis movement, belt conveyor, intelligent loading, etc.
The robot loader card swiping software is divided into card swiping software and identification card swiping software, and the two are used in conjunction. When the vehicle swipes the card twice successfully, its loading weight will be converted into the number of loaded bags by the internal computer, and the bag number information will be imported into the "brain" of the robot loader through the software system. At this time, the robot will accurately issue the corresponding loading quantity instructions.
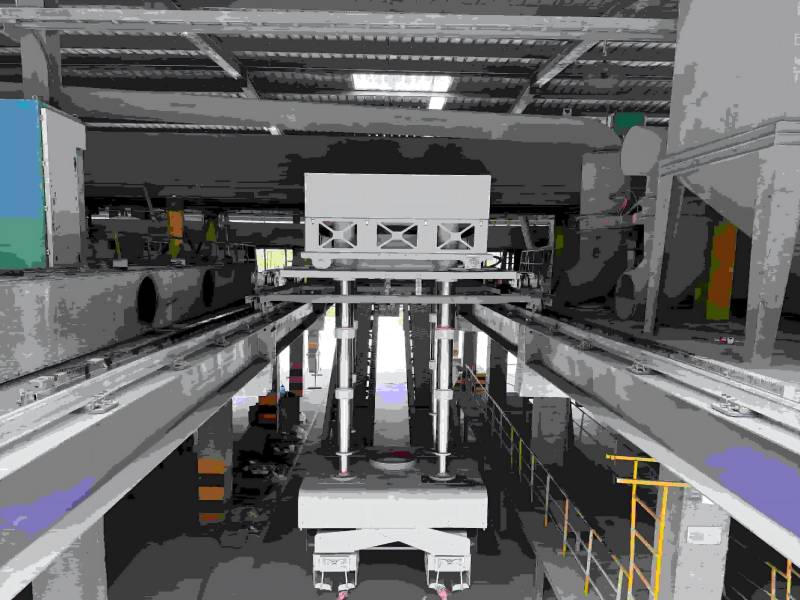
Application effect:
As shown in the loading effect after our company used the robot loader, the robot loader completed the cloud platform architecture of the intelligent loader, realized the combination of the local platform and the cloud platform, and the intelligent remote service and sharing of loading. Not only can the user solve the loader failure on site, but the manufacturer can also remotely and quickly solve the technical problems encountered by users during use.


Gachn group Automatic Bagged Cement PalletizingAnd Loading Machine has many patented technologies.
Gachn-JEENAR own segmented loading technology: effectively solves the problem of loading overlong vehicles.

Ganchn-JEENAR Automatic Bagged Cement Palletizing And Loading Machine just need convenient maintenance, reducing maintenance cost and time.
GACHN -JEENAR bagged cement palletizing and loading machine is Wide adaptability: Easily handles all types of trucks, including high-rail models.

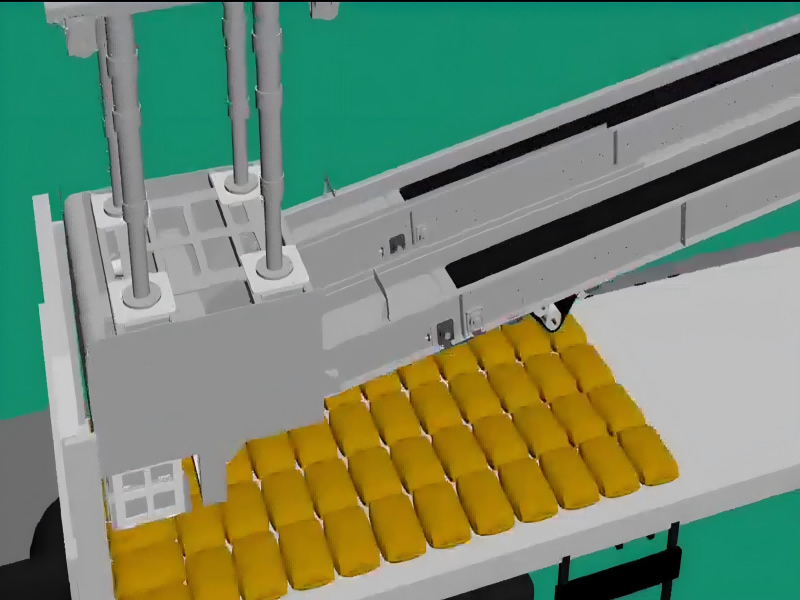
Gachn group Automatic bagged cement loading system machine head can be extended into the carriage to stack bags at a low position, thus reducing dust and bag breakage.
Gachn Bagged Palletizing And Loading Machine have Real-time data interaction: relying on the Internet of Things technology to achieve real-time data collection and analysis.
3D Scanning of Automatic bagged cement loading system for All Vehicle Types.
Gachn-JEENAR Double bagging head design: free lateral movement, close to the carriage for bagging.
Subscribe for the latest news. Stay updated on the latest trends.
 IPv6 network supported 闽ICP备20010238号-3
IPv6 network supported 闽ICP备20010238号-3



